1. TofAr component
The ToF AR TofAr component provides common functionality between other components.
The TofAr component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
Yes |
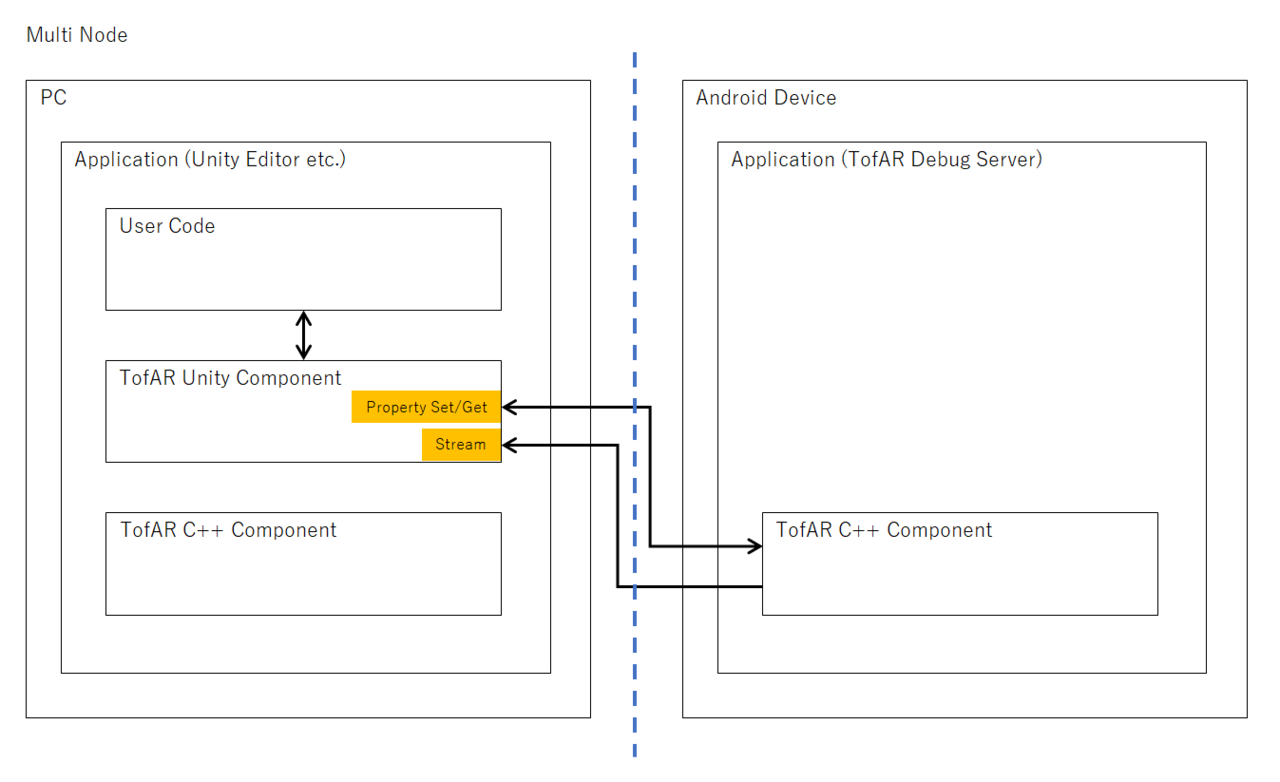
1.1. RunMode
RunMode represents ToF AR execution mode. ToF AR can operate in the following patterns.
With MultiNode, the sensor value and camera image of the Android device can be received and used by other devices.
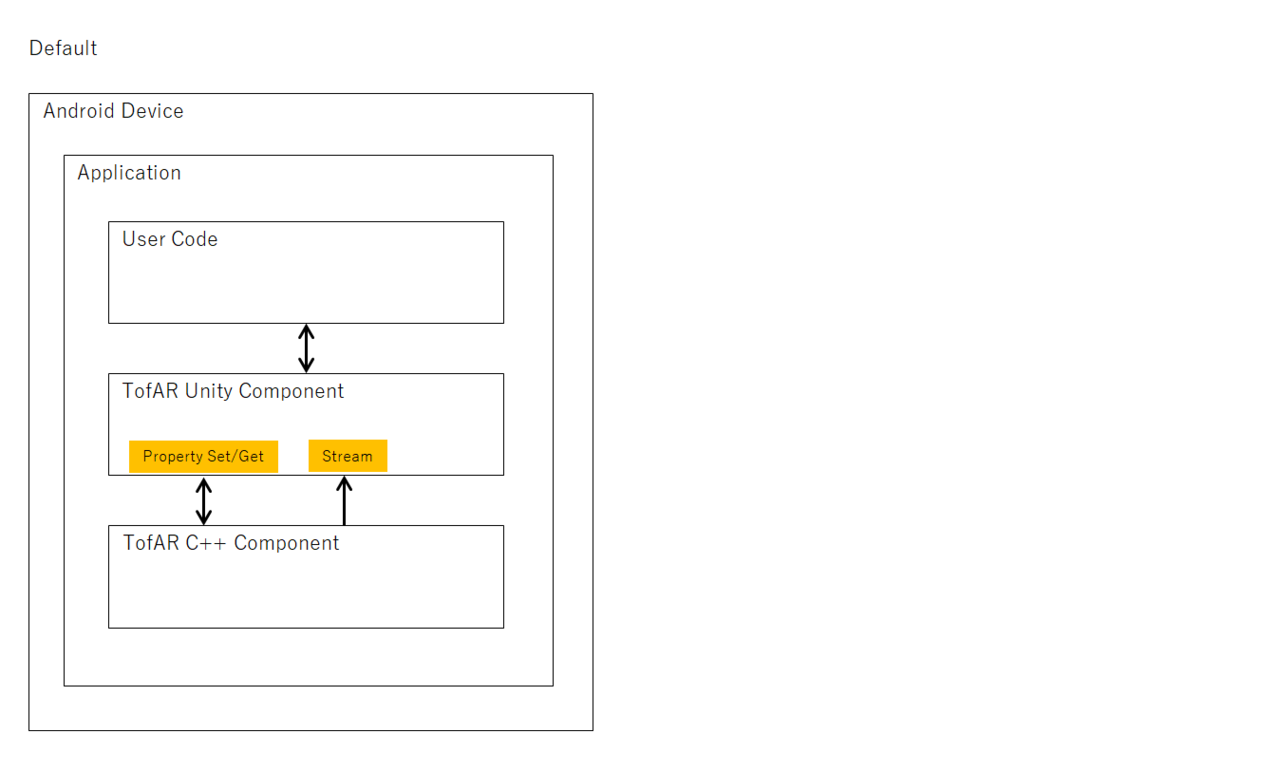
The current RunMode can be obtained from runMode in RuntimeSettingsProperty
1.2. Prefabs
| Name | Description |
|---|---|
TofArManager |
Provides SDK common functions |
1.3. Component description
For more details on the TofAr components, see API references for TofAr.
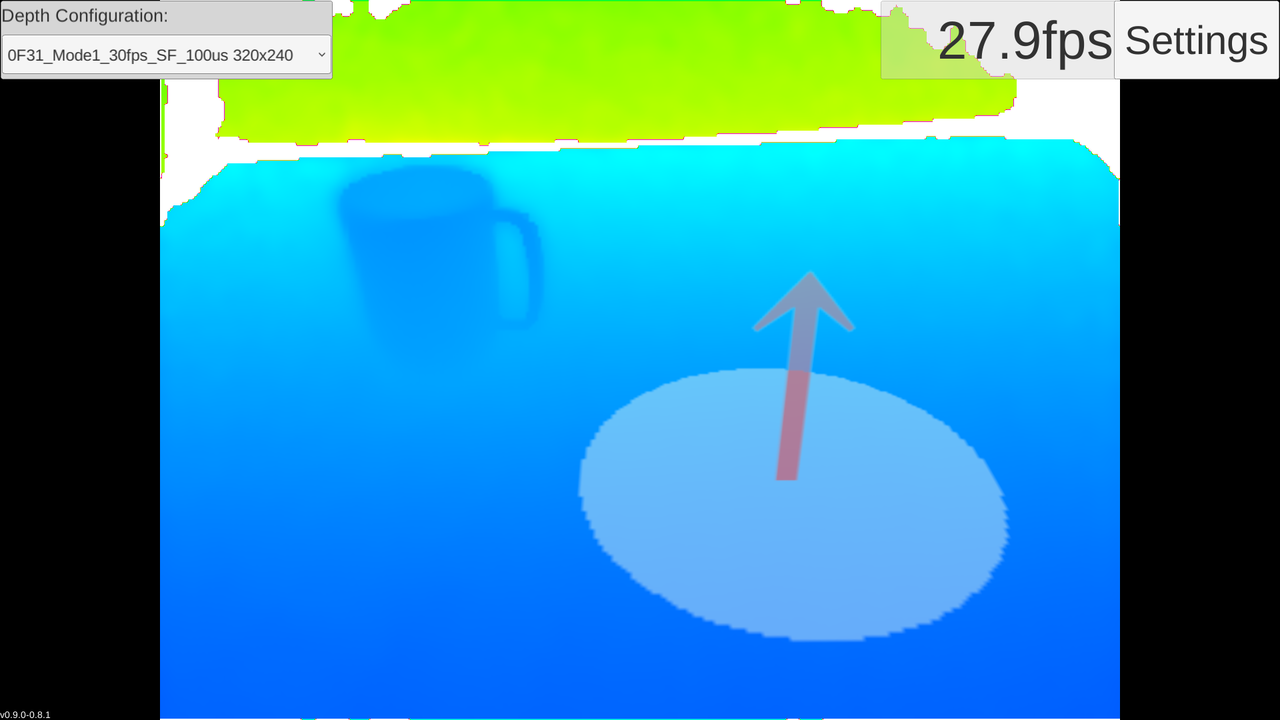
2. ToF component
The ToF AR ToF component
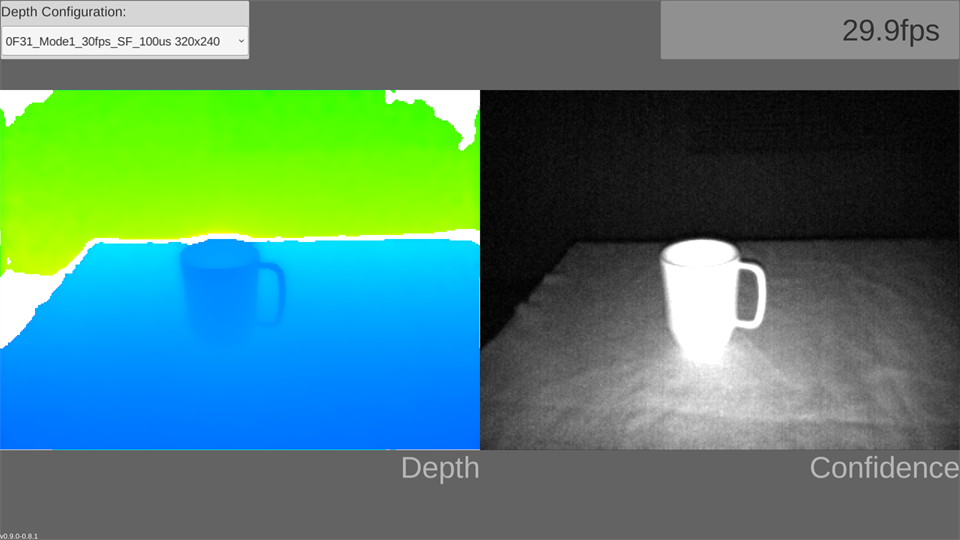
The ToF component provides access to the ToF camera’s Depth data, Confidence data and PointCloud data. The features provided are:
-
Data retrieval
-
Data visualization
-
Controlling the ToF camera (frame rate, shutter speed, and so on)
The ToF component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
Yes |
2.1. Streams and data structures
The application can retrieve data from the public fields in the manager shown in the following diagram.
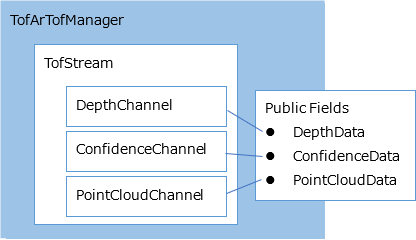
2.1.1. Data layout: Depth data
The pixels of the Depth image are stored as an array of shorts (16-bit). Each short represents the distance measured away from the ToF camera (the origin) in millimeters.
| [0] | [1] | [2] | […] | [Width * Height] |
|---|---|---|---|---|
2500 |
2550 |
2525 |
… |
0 |
2.1.2. Data layout: confidence data
The pixels of the Confidence image are stored as an array of shorts (16-bit). Each short is a Condfidence pixel value that is greater than or equal to zero.
| [0] | [1] | [2] | […] | [Width * Height] |
|---|---|---|---|---|
100 |
0 |
500 |
… |
0 |
2.1.3. Data layout: PointCloud data
The PointCloud is stored as an array of bytes (8-bit). The 16-bit value for each of x, y, and z is stored using two elements in the array.
Extract the values with:
-
System.BitConverter.ToInt16(byte[] value, int startIndex) -
System.BlockCopy (Array src, int srcOffset, Array dst, int dstOffset, int count)
For example:
// get single value.
short x = BitConverter.ToInt16(TofArTofManager.Instance.PointCloudData.Data, 0);
short y = BitConverter.ToInt16(TofArTofManager.Instance.PointCloudData.Data, 2);
// get all values.
int size = TofArTofManager.Instance.PointCloudData.Data.Length;
short[] all = new short[size / sizeof(short)];
Buffer.BlockCopy(TofArTofManager.Instance.PointCloudData.Data, 0, all, 0, size);| [0] | [1] | [2] | [3] | [4] | [5] | [6] | [7] | … | [Width * Height * 2 * 3] |
|---|---|---|---|---|---|---|---|---|---|
[x0] |
[y0] |
[z0] |
[x1] |
… |
[Width * Height * 3] |
||||
100 |
50 |
200 |
200 |
100 |
60 |
64 |
32 |
… |
0 |
2.2. Prefabs
| Name | Description |
|---|---|
TofArTofManager |
Manage the connection
with The ToF camera. |
DepthViewQuad |
Display Quad object of
ToF camera image. |
DepthViewRawImage |
Display RawImage object
of ToF camera image. |
PointCloudMesh |
Display Mesh object of
PointCloud. |
DepthConfigurationPanel |
UI for changing depth mode |
SkeletonDepthView |
RawImage object that shows Hand, Body and Face recognition results on ToF camera image. |
2.3. Component description
For more details on the Tof components, see API references for Tof.
3. Color component
The ToF AR Color component.
The color component provides access to the RGB camera data. The features provided are:
-
Data retrieval
-
Data visualization
-
Controlling the RGB camera (resolution, auto-focus, auto-exposure, white-balance, and so on)
-
Still image capture (only supported the use of AVFoundation on iOS devices)

This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
Yes |
3.1. Streams and data structures
The application can retrieve data from the public fields in the manager shown in the following diagram.
3.1.1. Data layout: color data
The pixels of the color image are stored as an array of bytes (8-bit). The bytes contain the color camera’s pixel data. The contents of the pixel data depends on the RGB camera’s hardware and settings.
| [0] | [1] | [2] | […] | [max] |
|---|---|---|---|---|
128 |
120 |
200 |
… |
0 |
3.1.2. Data layout: PhotoColor data
The image is stored as an array of bytes (8-bit), which format is specified at CapturePhotoProperty.
3.1.3. Data layout: PhotoDepth data
The pixels of Depth image captured when recording PhotoColor data are stored as an array of bytes (8-bit).
3.2. Prefabs
| Name | Description |
|---|---|
TofArColorManager |
Manage the connection
with the RGB camera. |
ColorViewQuad |
Display Quad object of
ToF camera image. |
ColorViewRawImage |
Display RawImage object
of ToF camera image. |
3.3. Component description
For more details on the Color component, see API references for Color.
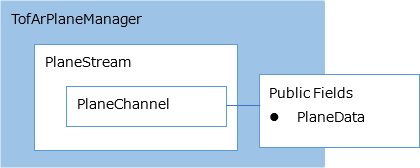
4. Plane component
The ToF AR Plane component
The plane component recognizes a plane in real time for any given point inside the Depth camera image. The features provided are:
-
Plane data retrieval
-
Dynamic updating of an object inside a Unity scene.
Can get/set up to eight detection configs at once. Plane detection stops executing if null or an empty config list is set.
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
Yes |
4.1. Streams and data structures
The application can retrieve data from the public fields in the manager shown in the following diagram.
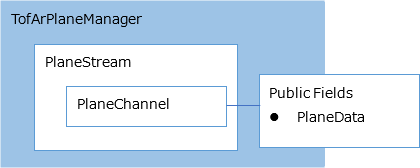
4.1.1. Data layout: plane data
Struct that stores the plane data.
| [Member] | [Type] | [Description] |
|---|---|---|
normal |
Vector3 |
Normal vector of plane |
center |
Vector3 |
Reference point of plane detection |
radius |
float |
Distance between the reference point and the closest plane |
4.2. Prefabs
| Name | Description |
|---|---|
TofArPlaneManager |
Manages the connection
with the ToF AR Plane
component. |
PlaneObject |
3D object visualizing
plane detection
result. |
4.3. Component description
For more details on the Plane component, see API references for Plane.
5. Mesh component
The ToF AR Mesh component.
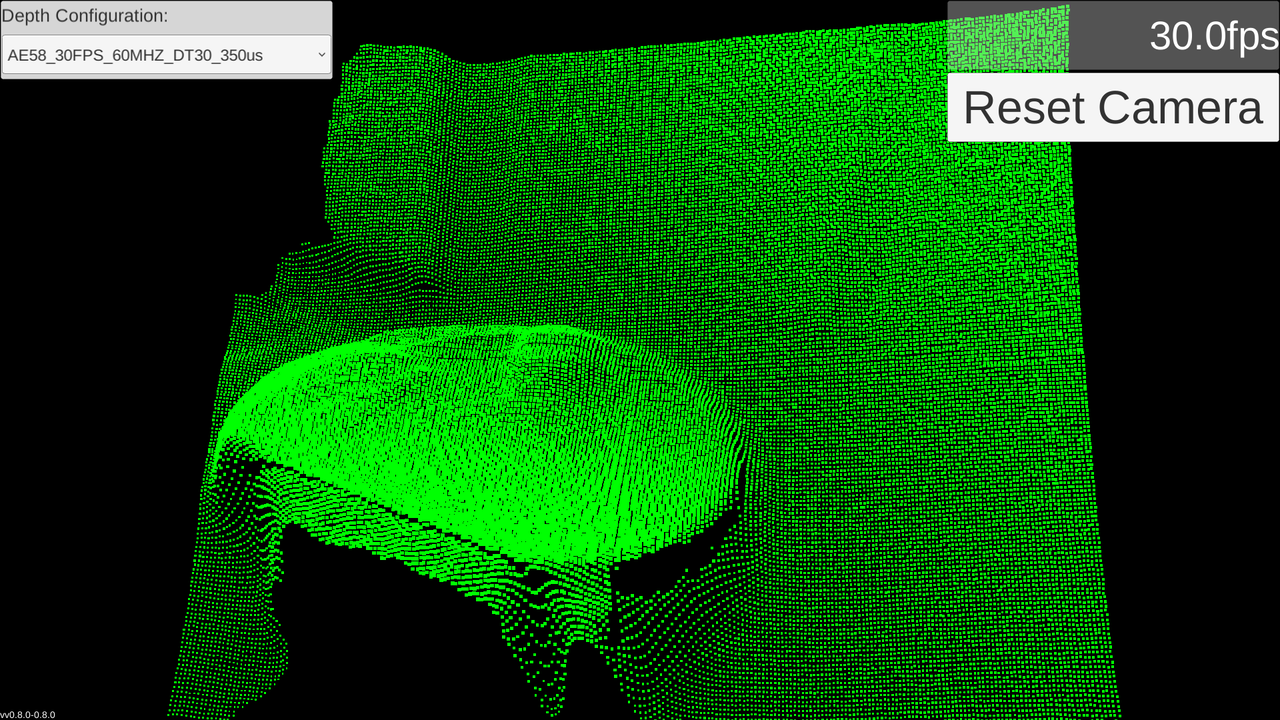
The mesh component generates a 3D mesh from the Depth camera image in real time. The features provided are:
-
Vertex or triangle data retrieval
-
Dynamic updating of a mesh object inside a Unity scene.
-
Mesh reduction control
-
Mesh generation excluding the mask part generated from the Segmentation component
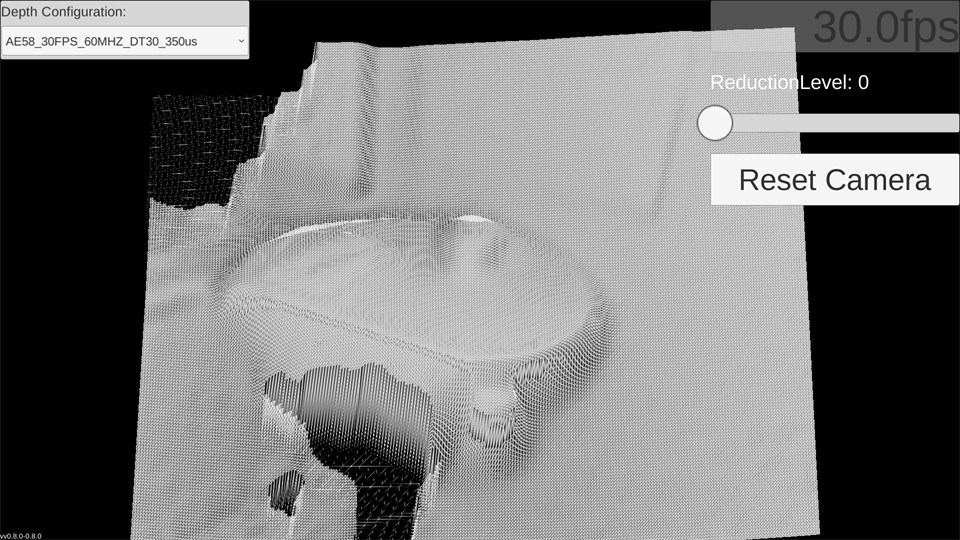
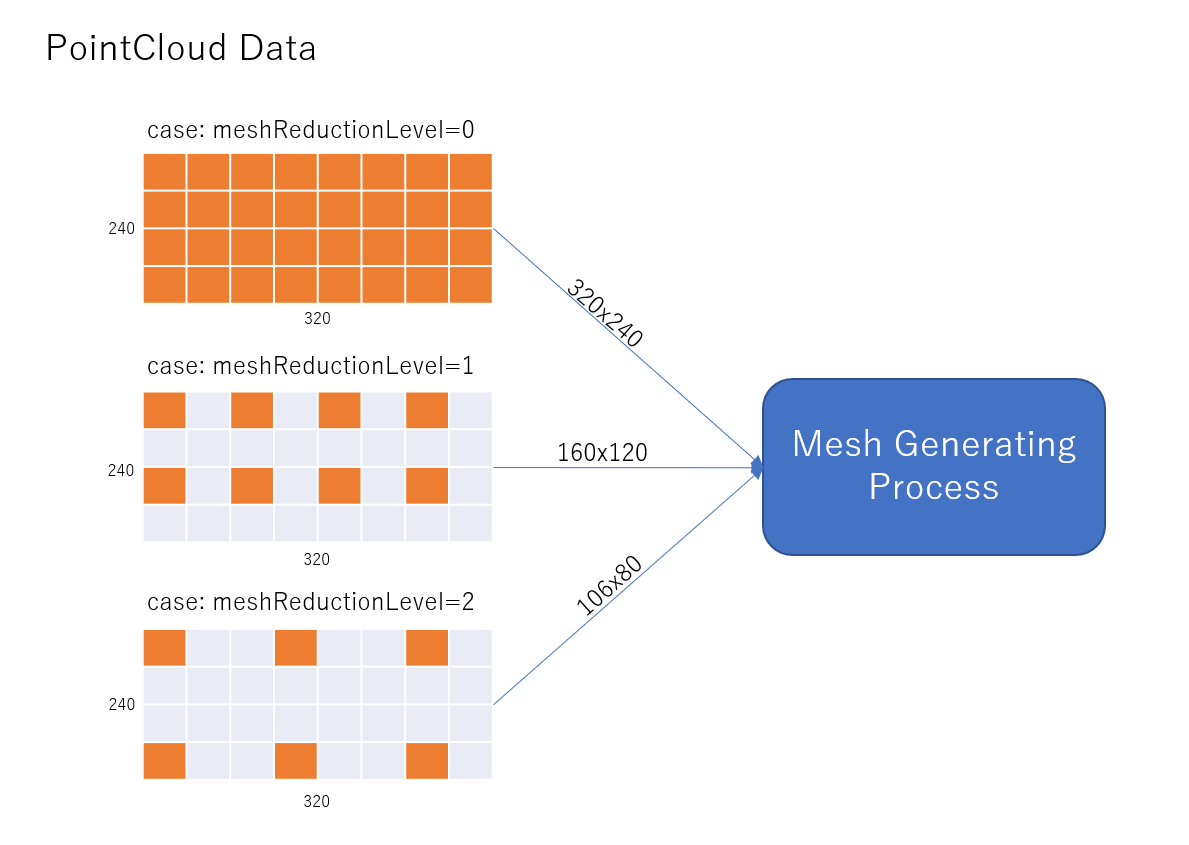
Mesh resolution can be controlled through the settings in AlgorithmConfigProperty.
By setting meshReductionLevel =
n, where n ≥ 0,
you can control the resolution of the mesh as only
1/(n+1) points will be used for mesh
generation.
When meshReductionLevel = 0, the
resolution is at its best.
The higher the value, the lower the resolution - but
the lighter it becomes.
In the figure below, the orange PointCloud data is
used as input data for the mesh generation.
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
Yes |
5.1. Streams and data structures
The application can retrieve data from the public fields in the manager shown in the following diagram.
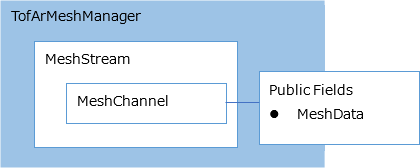
5.1.1. Data layout: mesh data
Struct that stores the vertex and triangle data.
| [Member] | [Type] | [Description] |
|---|---|---|
verticesCount |
int |
Vertex count |
vertices |
float* |
Pointer to vertex array |
trianglesCount |
int |
Triangle count |
triangles |
int* |
Pointer to triangle array |
5.2. Prefabs
| Name | Description |
|---|---|
TofArMeshManager |
Manages the connection
with ToF AR Mesh
component. |
DynamicMesh |
Mesh object visualizing
Mesh generation
result. |
5.3. Component description
For more details on the Mesh component, see API references for Mesh.
6. Coordinate component
The ToF AR Coordinate Component.
The coordinate component provides a means to convert between the different coordinate systems of the Depth, RGB and 3D cameras. It is mainly used for retrieving converted coordinate data through getting component properties.

Calibration information utilizes the
CalibrationSettings Prefab and is
able to be shared among applications.
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
Yes |
6.1. Streams and data structures
This component does not have access to stream data.
6.2. Prefabs
| Name | Description |
|---|---|
TofArCoordinateManager |
Manages the connection
with ToF AR Coordinate
component. |
CalibrationSettings |
Manages the calibration
information for the
Depth and Color image
mapping to function. |
6.3. Component description
For more details on the Coordinate component, see API references for Coordinate.
7. Hand component
The ToF AR Hand Component
The hand component recognizes in real time the location of the joints of the hand and fingers by utilizing the ToF camera data.
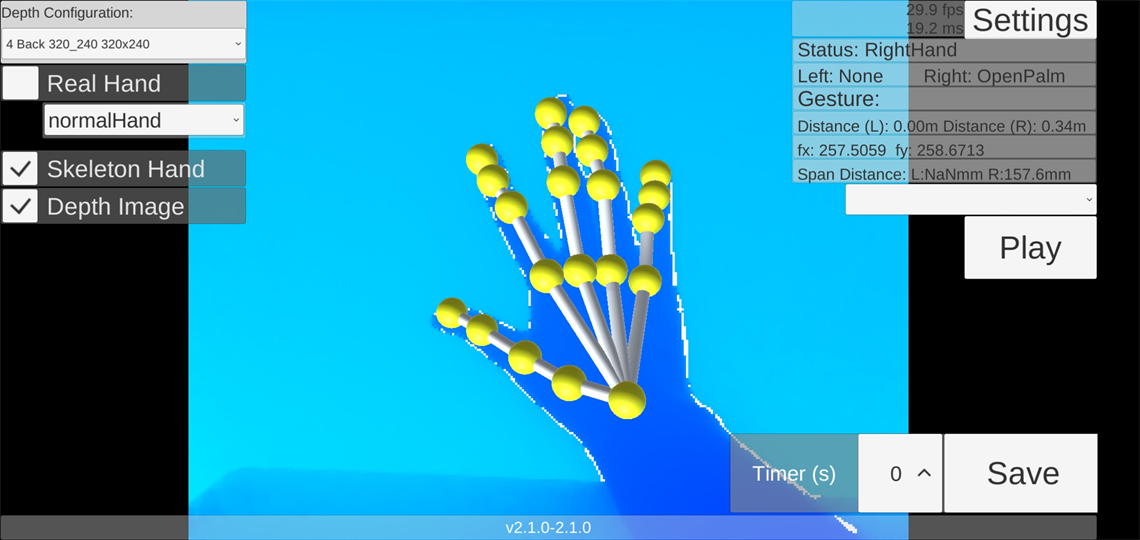
The features provided are:
-
Check whether a hand exists or not.
-
Retrieve the joint location data of the hand, and so on.
-
Display center point of both hands, only when
RecognizeConfigProperty.cameraFacingis set toFront. -
Hand pose and hand gesture recognition (hand pose recognition executes once, while hand gesture recognition executes continuously).
-
Fingertip plane touch estimation.
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
Yes |
7.1. Recognition mode
| Recognition mode | Description |
|---|---|
OneHandHoldSmapho |
Hold device with one hand, then extend other hand in front of the device and capture using the rear camera. |
Face2Face |
Face the device and capture one or boths hands using the front camera. |
HeadMount |
Equip the device onto VR goggles for smartphones and wear it on your head, then extend one or both hands out in front and capture using the rear camera. |
7.2. Recognition distance for each recognition mode
| Recognition mode | Recognition distance |
|---|---|
OneHandHoldSmapho |
100~800mm |
Face2Face |
100~1200mm |
HeadMount |
100~800mm |
7.3. Streams and data structures
The application can retrieve data from the public fields in the manager shown in the following diagram.
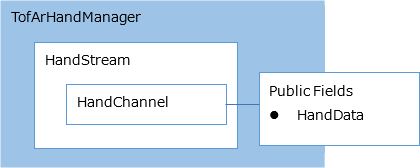
7.3.1. Data layout: hand data
Struct that stores hand data.
| [Member] | [Type] | [Description] |
|---|---|---|
handStatus |
Hand recognition status |
|
featurePointsLeft |
Vector3[] |
XYZ
coordinates of the left hand
and wrist feature points in
the camera coordinate
system |
featurePointsRight |
Vector3[] |
XYZ
coordinates of the right
hand and wrist feature
points in the camera
coordinate system |
poseLevelsLeft |
float[] |
Left hand pose recognition level |
poseLevelsRight |
float[] |
Right hand pose recognition level |
7.4. Hand feature point positions

| The coordinates of ArmCenter cannot be retrieved. |
7.5. About the Neural Network Library that executes hand recognition processing
The following Neural Network Libraries can be used on the lower layer of hand recognition processing:
-
TensorFlow Lite
The Neural Network Library and RuntimeMode used when executing the application are determined by the following flow:
-
The following values of Unity Inspector set for TofArHandManager
-
nnlib
-
runtimeMode
-
runtimeModeAfter
-
-
The default values for each device.
Refer to Default Settings for Hand Library and RuntimeMode for the default values for each device.
7.6. Device Orientation and HandModel Rotation Configuration Overview
| Cardboard XR Plugin | Orientation | [HandModel.] autoRotation |
HandModel rotation | |
|---|---|---|---|---|
1 |
Off |
Auto Rotation |
True |
Match device orientation |
2 |
Off |
Auto Rotation |
False |
Do not rotate |
3 |
Off |
Other |
True |
Match device orientation |
4 |
Off |
Other |
False |
Do not rotate |
5 |
On |
Landscape Right |
True |
Will display correctly when device orientation is Landscape Right |
6 |
On |
Landscape Right |
False |
Do not rotate (same orientation as 7) |
7 |
On |
Landscape Left |
True |
Will display correctly when device orientation is Landscape Left |
8 |
On |
Landscape Left |
False |
Do not rotate (same orientation as 7) |
7.7. About adding collision detection to the hand model
To add collision detection to the hand model, place the HandCollider Prefab into the scene, and set up any optional settings.
7.8. About pose estimation
Pose estimation recognizes hand poses in a single frame. Refer to PoseIndex for pose types.
7.9. About gesture estimation
Gesture estimation recognizes one-second continuous hand movement patterns. Refer to GestureIndex for pose types.
7.10. Prefabs
| Name | Description |
|---|---|
TofArHandManager |
Manages the connection
with ToF AR Hand
component. |
HandModel |
3D object visualizing
hand detection
result. |
RealHandModel |
3D object visualizing
hand detection
result.
|
HandCollider |
Enable collision
detection for hand
models. |
FingerTouchDetector |
Enables fingertip plane
touch estimation
function. |
7.11. Component description
For more details on the Hand component, see API references for Hand.
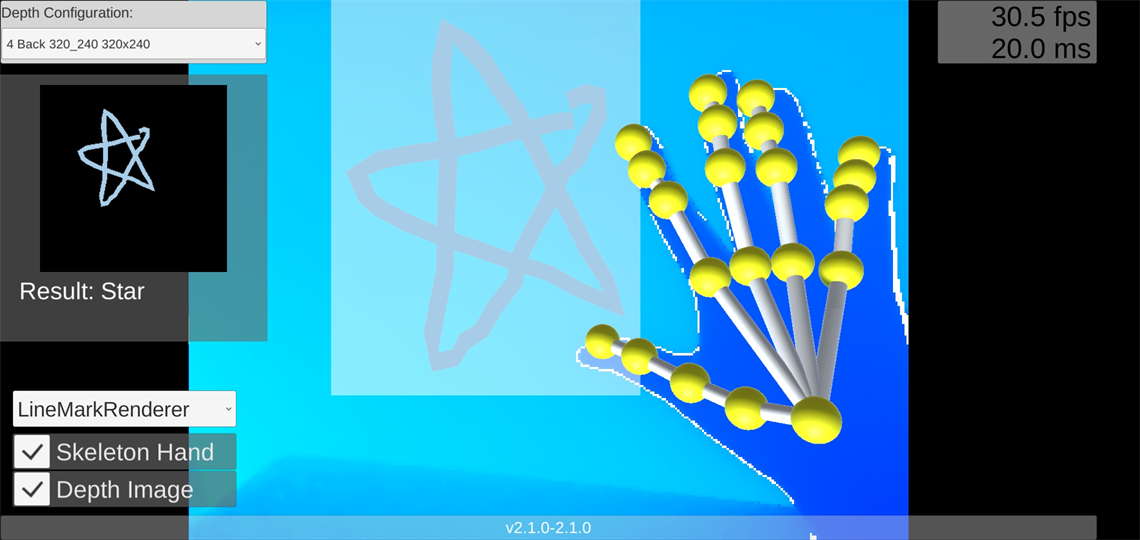
8. MarkRecog component
The ToF AR MarkRecog component.
The MarkRecog component recognizes optional marks located inside binary images. MarkRecog primarily supports the following function:
-
Recognition of mark located inside image.
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
No |
8.1. Streams and data structures
This component does not have access to stream data.
8.2. Prefabs
| Name | Description |
|---|---|
TofArMarkRecogManager |
Must be in scene for mark recognition to work. |
MarkImageDrawer |
Links with Hand recognition component and creates mark image. |
8.3. Component description
For more details on the MarkRecog component, see API references for MarkRecog.
9. Modeling Component
The ToF AR Modeling component.
The Modeling component accumulates depth data of ToF cameras over multiple frames and generates 3D Mesh data. It mainly provides the following functions:
-
Start/end 3D modeling process
-
Set 3D modeling parameters
-
Output data
-
Mesh generation excluding the mask part generated from the Segmentation component

This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
No |
9.1. Streams and data structures
The application can retrieve data from the public fields in the manager shown in the following diagram.
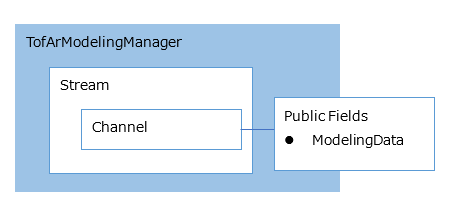
9.1.1. Data format: ModelingData
A structure that stores a list of vertices
and a list of triangles.
The modeling result may be divided into
multiple 3D mesh data (blocks), and the
member with the largest number of blocks is
stored in the list.
Data is stored in each member in the following format.
| [Member] | [Type] | [Description] |
|---|---|---|
vertices |
float[] |
Vertex array |
triangles |
int[] |
Triangle array |
blockIndex |
int[] |
Block index |
9.2. Prefabs
None
9.3. Component description
For more details on the Modeling component, see API references for Modeling.
10. Body component
The ToF AR Body component.
The Body component performs Body recognition related processing and provides recognition result data to the application. It provides the following functions:
-
Body recognition from ToF camera image
-
Body recognition data output in AR Foundation compliant format
-
Display of Body recognition result
-
Body gesture recognition
The application can get the data from the TofArBodyManager.BodyData field.
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
Available
Estimators: |
iOS |
Yes |
Available
Estimators: |
10.1. Data format: Body data
The application can get the structure that stores the Body information from the TofArBodyManager.BodyData field.
| [Member] | [Type] | [Description] |
|---|---|---|
results |
BodyResult[] |
Body information array |
BodyResult has the same definition as the ARHumanBody class of AR Foundation.
10.2. Definition of joint position
The basic definition of joint position is based on ARKit.
The joint position index corresponding to the charts in the Validating a Model for Motion Capture article from Apple is defined in TofAr.V0.Body.JointIndices.
Since the actual numbers of joint data and joint positions recognized differ depending on the Body recognition engine used, they are converted and stored in Body data. The conversion mapping will be described separately.
10.3. Body recognition engine
Supports the following recognition engines:
10.4. About gesture estimation
Gesture estimation is performed on the TofArBodyGestureManager. The gesture estimation result can be obtained by registering to the TofArBodyGestureManager.OnGestureEstimated event handler.
Refer to BodyGesture for gesture types.
10.5. Prefabs
| Name | Description |
|---|---|
TofArBodyManager |
Manages the connection
with ToF AR Body
component. |
BodySkeleton |
Display Body recognition result as simple skeleton. |
10.6. Component description
For more details on the Body component, see API references for Body.
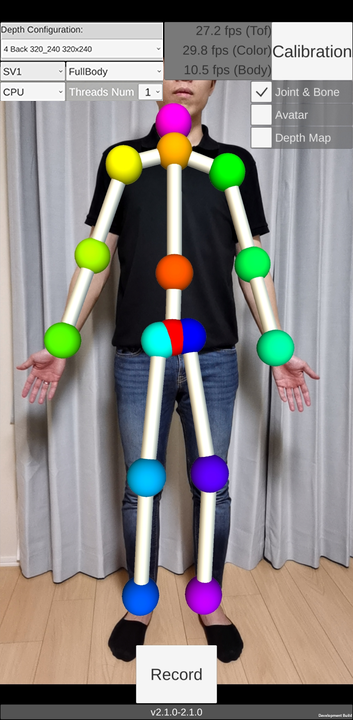
11. SV2BodyPoseEstimator
Performs Body recognition processing on ToF AR Depth data.
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
Yes |
11.1. Method
11.1.1. Scene settings
-
The following must be in the scene:
-
TofArTof/TofArTofManager
-
TofArBody/TofArBodyManager
-
-
Set TofArBodyManager.DetectorType to BodyPoseDetectorType.Internal_SV2
-
Place BodySkeleton Prefab at the origin of the scene.
11.1.2. Runtime settings
The recognition process starts when TofArTofManager and TofArBodyManager start.
11.2. Joint position mapping
Maps the recognition result to the ARKit joint index.
| ARKit | SV2BodyPoseEstimator joint index |
|---|---|
JointIndices.Head |
0 |
JointIndices.Neck1 |
1 |
JointIndices.RightShoulder1 |
2 |
JointIndices.RightForearm |
3 |
JointIndices.RightHand |
4 |
JointIndices.LeftShoulder1 |
5 |
JointIndices.LeftForearm |
6 |
JointIndices.LeftHand |
7 |
JointIndices.RightUpLeg |
8 |
JointIndices.RightLeg |
9 |
JointIndices.RightFoot |
10 |
JointIndices.LeftUpLeg |
11 |
JointIndices.LeftLeg |
12 |
JointIndices.LeftFoot |
13 |
JointIndices.RightEyeball |
14 |
JointIndices.LeftEyeball |
15 |
JointIndices.RightEye |
16 |
JointIndices.LeftEye |
17 |
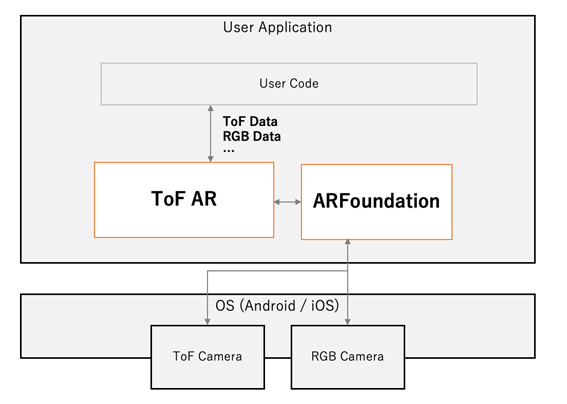
12. ARFoundationConnector
ARFoundationConnector allows you to use both ARFoundation and ToF AR in UnityProject. The current version of ToF AR does not control the lower layer of the camera directly. ToF AR uses output data frames from the RGB or ToF cameras which are obtained by ARFoundation, and then runs the Hand and Body recognition processes. Using ARFoundationConnector, app developers can receive data frames from ToF AR with the same interface, even if ARFoundation is not used directly.
12.1. Method
For more details, see Use AR Foundation.
12.2. Prefabs
| Name | Description |
|---|---|
ARFoundationConnector |
A function that inputs
frame data obtained by
ARFoundation to ToF
AR. |
12.3. Component description
ARFoundationConnector can obtain data from Manager component on ToF AR corresponding to the data below that ARFoundation outputs.
| Functions of ARFoundation | Corresponding ToF AR Manager |
|---|---|
RGB Color image |
TofArColorManager |
Depth data |
TofArTofManager |
Human Stencil, Human Depth |
TofArSegmentationManager |
3D Body tracking |
TofArBodyManager |
Face tracking |
TofArFaceManager |
Device tracking |
TofArSlamManager |
For more details on the features that
ARFoundation supports on each platform, see com.unity.xr.arfoundation
(Platform Support).
Features that are not supported by ARFoundation
are also not supported by ToF AR.
13. Segmentation Component
The ToF AR Segmentation Component.

The Segmentation component performs Segmentation recognition related processing and provides recognition result data to the application. It mainly provides the following functions:
-
Create a mask texture by estimating the sky section from the Color camera image (When using SkyDetector).
-
Create a mask texture by estimating the person section from the Color camera image (When using HumanDetector).
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
Available Estimators: |
iOS |
Yes |
Available Estimators: |
13.1. Data format: Segmentation data
The application can get the structure that stores the Segmentation information from the TofArSegmentationManager.SegmentationData field. Please refer to SegmentationResults
13.2. Segmentation recognition engine
Supports the following recognition engines:
13.3. Prefabs
| Name | Description |
|---|---|
TofArSegmentationManager |
Manages the connection
with ToF AR Segmentation
component. |
SkySegmentationDetector |
Creates a mask texture by estimating the sky section from the Color camera image. |
HumanSegmentationDetector |
Creates a mask texture by estimating the person section from the Color camera image. |
13.4. Component description
For more details on the Segmentation component, see API references for Segmentation.
14. SkyDetector
Creates a mask texture by estimating the sky section from the Color camera image.
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
Yes |
14.1. Method
-
Places SkySegmentationDetector Prefab into the scene.
Upon start, connects to TofArColorManager and TofArSegmentationManager, and starts estimation processing. Therefore, each Manager must already exist at the start.
TofArColorManager needs to be set to output RGB format Color data. For more details, refer to FormatConvertProperty.
14.2. Output data format
14.2.1. Segmentaton information
The application can get the structure that stores the Segmentation information from the TofArSegmentationManager.SegmentationData field. For more details, refer to SegmentationResults
OutputFormat
| SegmentationResult.name | SegmentationResult.rawPointer | SegmentationResult.maskBufferByte |
|---|---|---|
Sky |
Pointer to the TextureFormat.R8 format buffer |
TextureFormat.R8 format buffer |
14.3. Mask texture 2D information
Texture2D can be obtained from the SkySegmentationDetector.MaskTexture property.
The texture format is TextureFormat.R8
For more details, refer to API references for Segmentation.Sky
15. HumanDetector
Creates a mask texture by estimating the human parts in the Color camera image.
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
Yes |
|
iOS |
Yes |
15.1. Method
-
Place the HumanSegmentationDetector Prefab into the scene.
Upon start, this connects to TofArColorManager and TofArSegmentationManager, and starts estimation processing. Therefore, each Manager must already exist at the start.
TofArColorManager must be set to output RGB format Color data. For more details, refer to FormatConvertProperty
15.2. Output data format
15.2.1. Segmentaton information
The application can get the structure that stores the Segmentation information from the TofArSegmentationManager.SegmentationData field. For more details, refer to SegmentationResults.
OutputFormat
| SegmentationResult.name | SegmentationResult.rawPointer | SegmentationResult.maskBufferByte |
|---|---|---|
Human |
Pointer to the TextureFormat.R8 format buffer |
TextureFormat.R8 format buffer |
15.3. Mask texture 2D information
Texture2D can be obtained from the HumanSegmentationDetector.MaskTexture property.
The texture format is TextureFormat.R8
For more details, refer to API references for Segmentation.Human
16. AR Foundation Human Stencil / Human Depth
Gets Human Stencil data and Human Depth data from AR Foundation and create mask texture.
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
No |
|
iOS |
Yes |
16.1. Method
-
Setup ARFoundationConnector. For more information, see Setting up AR Foundation.
-
Enable AR Foundation Segmentation component from ARFoundationConnector Inspector.
-
Enable Capture Stencil and Capture Depth in AR Foundation Segmentation component.
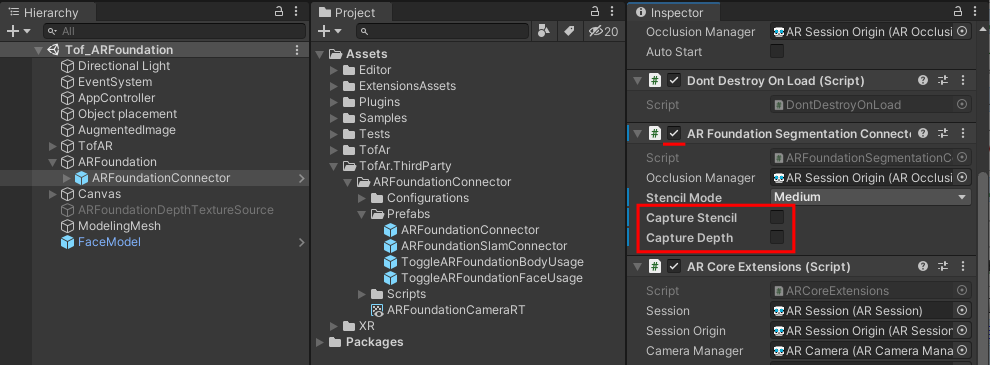
Connects to TofArSegmentationManager at runtime and processes. Therefore, it is necessary that the manager already exists at runtime.
16.2. Output data format
The structure containing Segmentation information can be obtained from the TofArSegmentationManager.SegmentationData field. For more details, refer to SegmentationResults.
OutputFormat
| SegmentationResult.name | SegmentationResult.rawPointer | SegmentationResult.maskBufferByte | SegmentationResult.maskBufferFloat |
|---|---|---|---|
Human |
Pointer to the TextureFormat.R8 format buffer |
TextureFormat.R8 format buffer |
|
HumanDepth |
Pointer to the TextureFormat.RFloat format buffer |
TextureFormat.RFloat format buffer |
17. Face component
The ToF AR Face component.
The Face component performs Face recognition related processing and provides recognition result data to the application. It mainly provides the following functions:
-
Output Face recognition data and BlendShape data in an AR Foundation compliant format
-
Display Face recognition results
-
Display line of sight recognition results

The application can get the data from the TofArFaceManager.FaceData field.
This component is available on the following platforms:
| Platform | Available | Note |
|---|---|---|
Android |
No |
|
iOS |
Yes |
Uses ARKit internally. |
17.1. Data format: Face data
The application can obtain the structure containing Face information from the TofArFaceManager.FaceData field.
| [Member] | [Type] | [Description] |
|---|---|---|
results |
FaceResult[] |
Body information array |
FaceResult is defined like the AR Foundation ARFace class with an additional field for BlendShape data.
17.2. Prefabs
| Name | Description |
|---|---|
TofArFaceManager |
Manages the connection
with ToF AR Face
component. |
FaceModel |
Displays face recognition
result as Mesh. |
17.3. Component description
For more details on the Face component, see API references for Face.